

CALL US TODAY
1-(844)-809-9990

You’re glassing a picked cornfield at 11 PM. Your buddy’s thermal scope picks up a coyote trotting the far tree line at 275 yards—clear outline, head visible, tail swinging. Before you drop serious money on your next setup from our thermal scopes collection, it pays to understand why yours shows a blurry gray smear even with similar specs on the box—and what’s really happening inside the sensor core that makes the difference.
The answer lives inside the sensor - specifically, the microbolometer thermal core - and most buyers never dig that deep. Thermal scopes detect warm-blooded animals in total darkness, not by "seeing heat" directly, but by detecting infrared light emitted by objects due to their temperature.
That infrared light strikes a sensor array, where it is absorbed by microscopic elements in the sensor, causing them to warm ever so slightly. This tiny temperature change alters the electrical resistance of each element, producing electrical signals that the scope's processor converts into the thermal image you see on the display. The quality of that image - whether you see a crisp coyote or a useless blob - comes down to what's physically inside that core: the sensor material, the pixel architecture, and a handful of specs most marketing glosses over.
This article breaks down thermal imaging technology at the component level. You'll learn what a microbolometer actually is, what each pixel is made of, why VOx outperforms a-Si on tough nights, and how to read sensor resolution, pixel pitch, and noise equivalent temperature difference (NETD) as a system rather than a checklist. Whether you're shopping for your first thermal rifle scope or upgrading from an older unit, Proven Optic built this guide so you can predict real-world image quality before you spend a dollar.
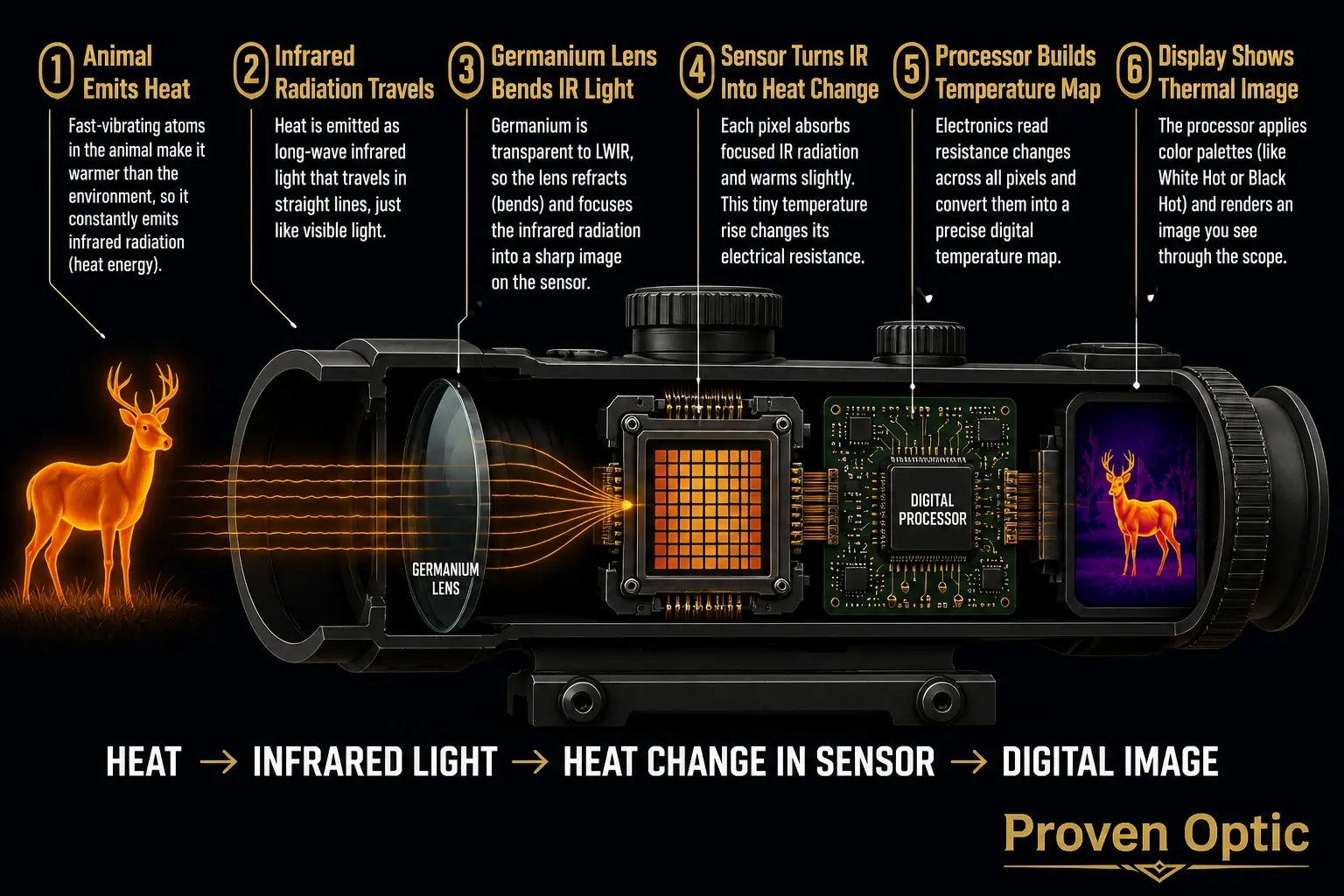
Here's the myth that won't die: thermal scopes "see heat." They don't. Thermal imaging detects heat energy emitted by objects in the form of infrared radiation - specifically, mid- to long-wave infrared light in the 8–14 µm wavelength band. Every object above absolute zero (-459.67°F) radiates this invisible infrared energy. Warmer objects radiate more intensely. The scope's job is to capture IR light and convert it into a visible thermal image.
Think of every warm-blooded animal, vehicle, or person as a tiny IR radio transmitter. The scope's objective lens is the antenna, and the microbolometer sensor is the receiver. Unlike traditional optics that rely on visible light or night-vision optics that amplify reflected light, thermal imaging devices require no ambient light. Thermal scopes work in total darkness and fog because infrared light passes through atmospheric obscurants that block visible and shorter-wavelength infrared light.
The imaging chain works like this: the scene emits heat radiation variations across every surface. A germanium objective lens - not ordinary glass, because glass is opaque to long-wave IR - captures that infrared light and focuses it onto the microbolometer sensor array. Thermal scopes use germanium lenses to capture infrared light because germanium transmits the 8–14 µm band efficiently. The sensor converts incoming IR into electrical signals. A processing unit applies algorithms to enhance image contrast and reduce noise in thermal images. Finally, the processed thermal image is displayed on a screen inside the scope for the user.
Thermal imaging reveals warm-bodied animals against cooler backgrounds, which is why thermal scopes can see through fog, smoke, and light vegetation. The scope essentially creates a digital heat map by detecting differences in infrared light emitted by objects across the scene. Every link in this chain - lens quality, sensor sensitivity, processing, display - affects your detection range, thermal contrast, and target identification range at real hunting distances.
A microbolometer (sensor) is an uncooled infrared focal plane array (FPA) - a grid of thousands of microscopic pixels, each one a tiny resistor whose electrical resistance shifts when infrared light strikes it. Microbolometers convert infrared light into electrical signals, and those signals get processed into the image you see. Think of it as a grid of tiny electronic thermometers, each one detecting the intensity of infrared light from a small slice of your scene, refreshing 30 to 60 times per second. Rather than measuring exact temperatures, each pixel senses changes in IR energy that correspond to heat emitted by objects, which the sensor converts into electrical signals for image processing.
The thermal camera core - what manufacturers and spec sheets call "the core" - typically refers to the integrated microbolometer array, the readout electronics beneath it, vacuum packaging, and associated processing circuitry, all housed inside a compact module within the scope body. This is the IR light-sensing imaging core that determines the ceiling of your scope's performance. Everything else - the lens, the display, the software - can only work with what the core gives it.
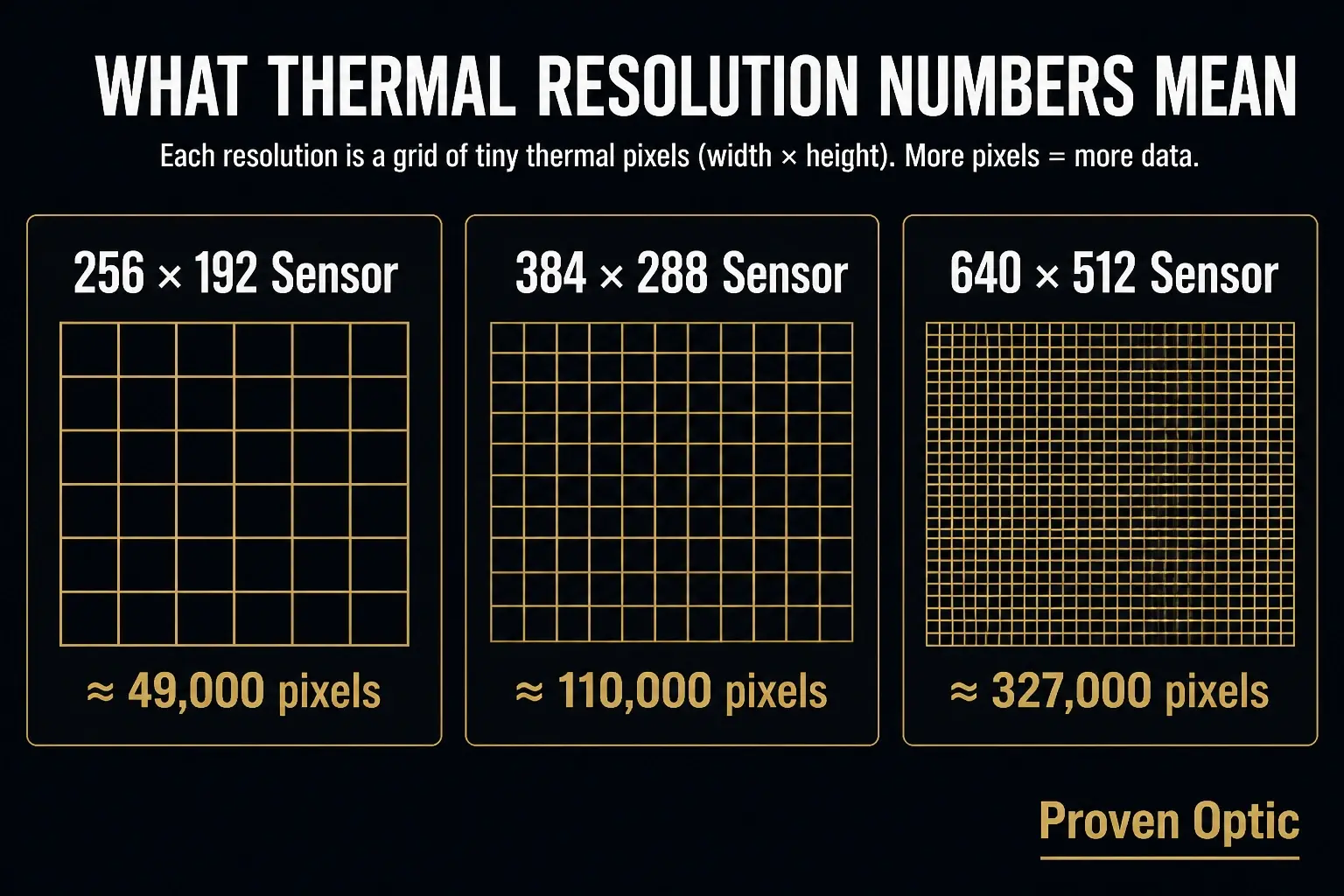
Thermal core resolution is expressed as pixel count: thermal scopes typically feature resolutions from 256x192 to 640x512. A 256×192 sensor has roughly 49,000 pixels. A 384×288 sensor holds about 110,000. A 640×512 sensor packs over 327,000 individual thermal sensors into the array. Higher-end units push to 1024×768 or beyond. More pixels mean more spatial detail, which directly impacts how clearly you can distinguish a coyote from a fence post at 300 yards. A 640x480 resolution offers high-definition imaging that makes identification at extended range practical. If you want to see how these specs come together in a real-world optic, take a look at our AGM Adder V2 640 thermal scope, which uses a 12 µm VOx core and low-NETD sensor for long-range coyote work.
Thermal scopes can operate effectively in total darkness - no moonlight, no starlight, nothing. That's because the sensor reads emitted IR, not reflected visible light. This is the fundamental divide: thermal scopes detect infrared signatures, while night vision amplifies light. Night vision requires some ambient light to function; thermal imaging works without any.
Quick note on cooled sensors: Military and scientific thermal systems use cryogenically cooled photon detectors that achieve extreme sensitivity but require bulky cooling hardware, draw heavy power, and cost tens of thousands of dollars. They're not what's inside hunting or law enforcement thermal scopes. For hunters and shooters, uncooled microbolometers are the standard - they start instantly, run quietly, and balance sensor sensitivity with practical battery life.
Thermal scopes don’t actually “see heat” the way we might imagine; instead, they detect infrared (IR) light, which is invisible radiation emitted by objects because of their temperature. When this IR light enters the scope through the lens, it strikes the sensor inside—specifically, the microbolometer array. Each tiny pixel in the sensor absorbs the IR light and, as a result, warms up slightly. This tiny amount of heat changes the electrical resistance of each pixel, and the sensor measures these changes to create the thermal image you see. So, while the scope isn’t directly seeing heat itself, the IR light caused by heat interacts with the sensor in a way that produces measurable signals, allowing you to visualize temperature differences in the scene.
Here's where it gets interesting - and where the real quality differences between a $1,500 and a $5,000 scope are born. Two scopes can both advertise 640×512 thermal sensor resolution and still deliver wildly different image quality because the architecture inside each pixel determines how cleanly the IR signal is captured, isolated, and read.
Every microbolometer pixel is a layered micro-structure suspended in vacuum above the readout chip. Five key components define its performance.
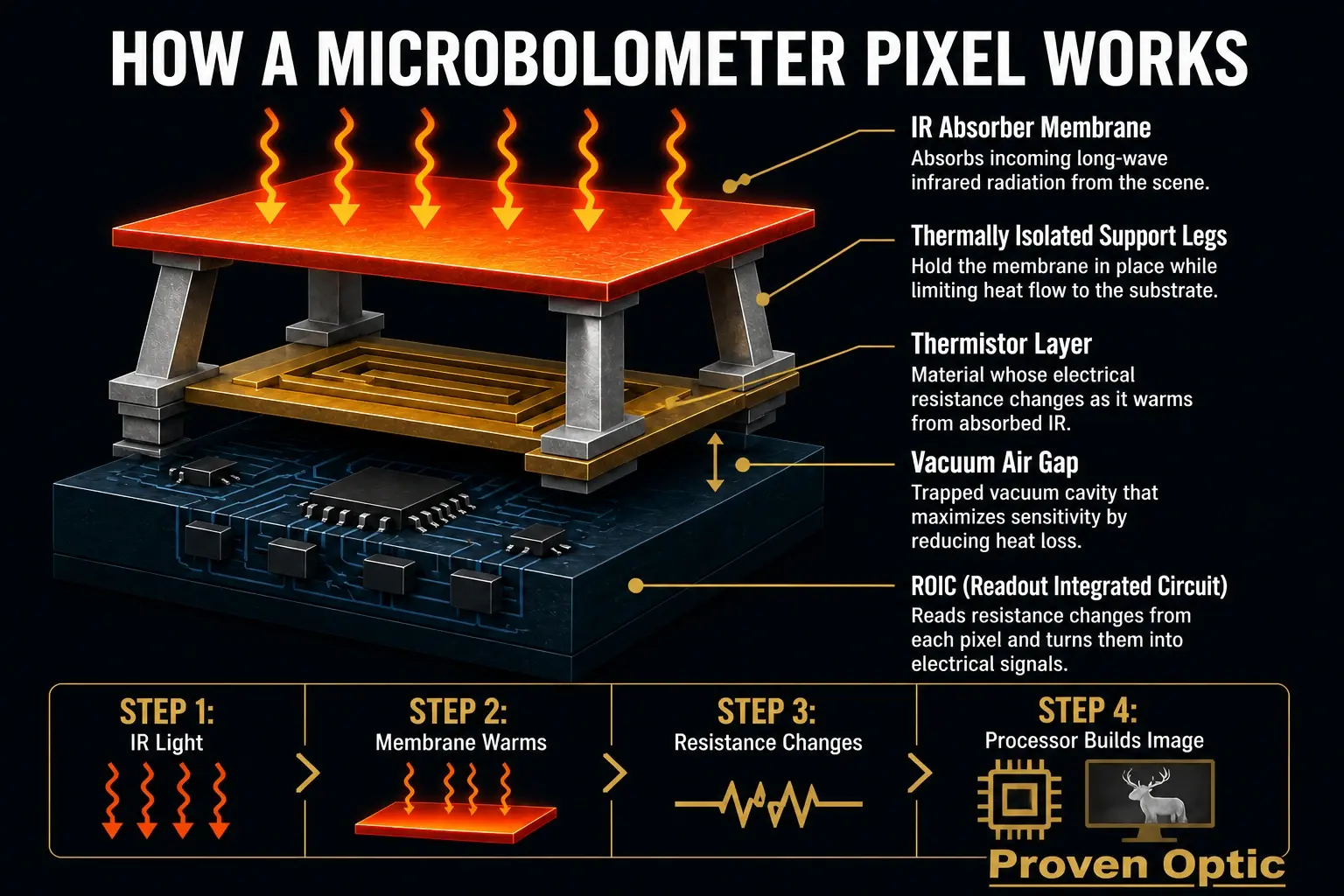
The absorber layer is the sensor's IR sponge - and what it's made of is one of the biggest hidden quality differences in thermal scopes. This thin film (often VOx or a-Si) is tuned to absorb infrared light in the 8–14 µm band. Higher absorptivity means a stronger signal from each pixel, which translates to cleaner target separation on warm, humid nights when thermal contrast between a hog and the ground behind it is razor-thin. A weak or uneven absorber yields washed-out images regardless of what the spec sheet says.
Micro-bridges are the tiny legs that suspend each absorber above the readout circuit. Their job is thermal isolation - ensuring each pixel's temperature tracks incoming IR, not heat bleeding from the substrate or neighboring pixels. This is why one scope can stay clean and stable for years while another starts to look grainy or "drifty" in the cold. Poorly designed bridges increase heat conduction, raise noise, and accelerate dead-pixel formation.
The reflector sits beneath the absorber, acting as a tiny mirror that bounces any IR energy that passed through the absorber back up for a second chance at detection. This improves sensor sensitivity without increasing pixel size, which matters when you're trying to pick out a small coyote at 400 yards against cluttered terrain.
The ROIC (Read-Out Integrated Circuit) is the interpreter. It sits directly under the pixel grid and reads every single pixel's change in electrical resistance, converts that into voltage, amplifies it, and streams all those electrical signals to the processor at the sensor's refresh rate. A noisy or slow ROIC introduces grain and lag that no amount of software can fully fix.
The hermetic vacuum package and getter seal everything in a near-perfect vacuum. Without vacuum, convection and conduction would swamp the tiny temperature changes each pixel is trying to measure. A well-sealed core holds its performance for years. The getter material inside the package absorbs residual gases over time, preventing gradual degradation. This is why a quality thermal device maintains its NETD spec season after season, while cheaper assemblies slowly lose sharpness.
NETD measures the smallest temperature difference a sensor can detect. Every element above - absorber efficiency, bridge isolation, reflector gain, ROIC noise floor, and vacuum integrity - feeds directly into that number.
You'll sometimes see "VOx sensor" listed as a premium feature. Here's why it actually matters when your thermal scope is pointed at a damp October tree line.
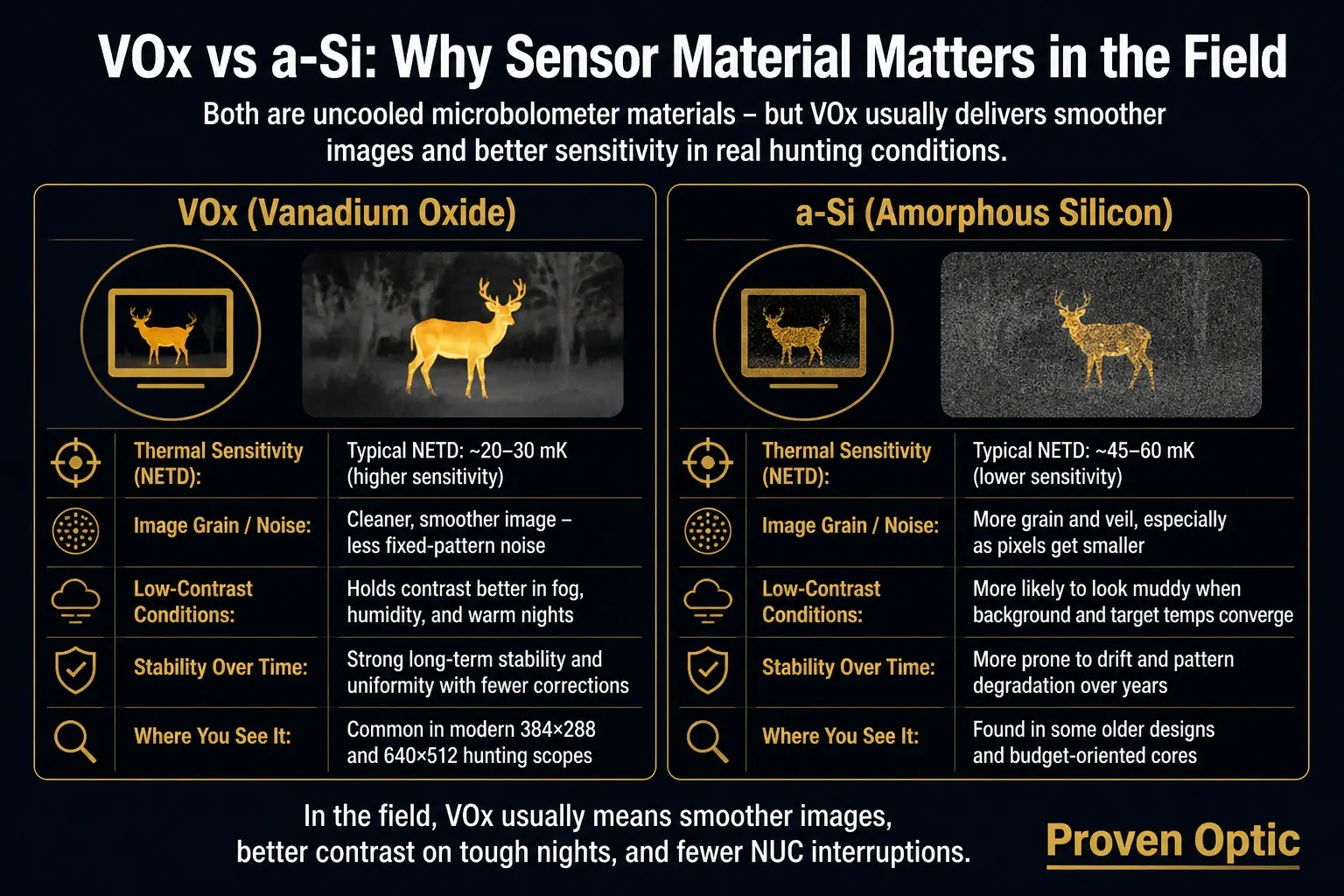
VOx (vanadium oxide) and a-Si (amorphous silicon) are the two main absorber materials used in uncooled microbolometers across hunting thermal optics. The difference isn't academic - it shows up as image grain, contrast stability, and long-term reliability in the field. VOx cores generally achieve lower NETD values, often below 30 mK in commercial units, while a-Si cores typically land in the 45–60 mK range. That gap in thermal sensitivity translates directly to how well a scope can resolve heat differences on warm nights when background and target temperatures converge.
In practice, VOx delivers smoother, less grainy images. On foggy or humid evenings - exactly the conditions where thermal imaging excels in tracking wounded game - VOx holds thermal contrast better because it can detect temperature variations that a-Si simply can't resolve. Thermal scopes excel in detecting camouflaged animals where night vision struggles, and VOx makes that advantage more consistent across seasons.
Many modern thermal scopes in the 384×288 and 640×512 resolution classes from 2022 through 2026 use VOx. Some older or lower-cost cores still rely on a-Si. VOx also tends to require fewer non-uniformity corrections (NUC), meaning fewer interruptions during your hunt when the thermal core temporarily pauses to recalibrate.
At Proven Optic, we prioritize VOx-based cores for serious hunting and tactical use because of their more consistent real-world image clarity - especially when conditions turn challenging.
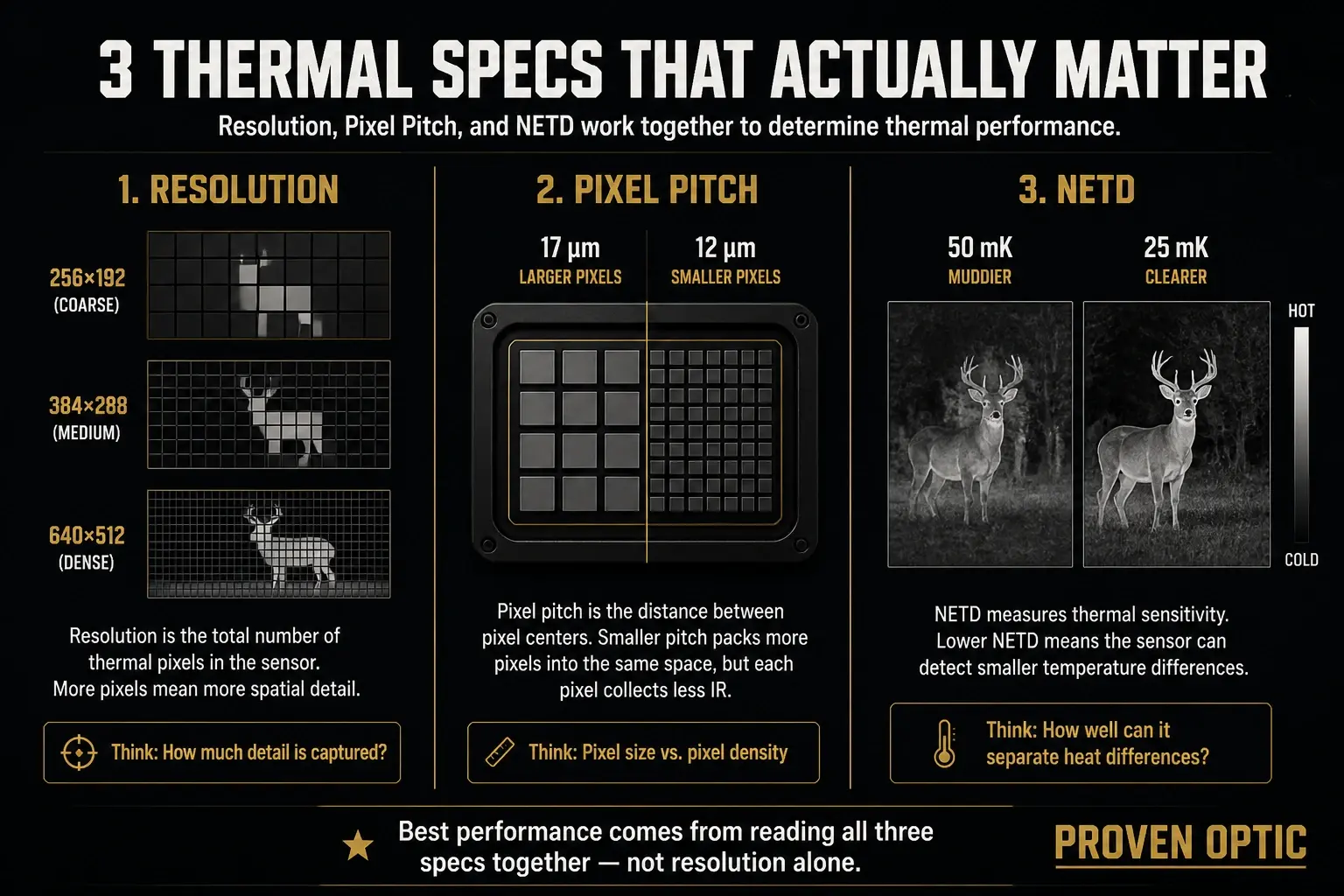
Sensor resolution is almost always the first number hunters look at. It's also the most misunderstood - because resolution alone doesn't set your thermal scope's detection range or image quality. Three specs work as a system: resolution, pixel pitch, and NETD. Read them together or don't read them at all.
Resolution tells you how many pixels the sensor has. A jump from 320×240 (~77,000 pixels) to 640×512 (~327,000 pixels) roughly quadruples the spatial detail available. That matters most beyond 150 yards, where higher thermal core resolution lets you identify targets - distinguishing a coyote from a dog, or a bedded hog from a rock - instead of just detecting a warm blob. Detection range varies from 500 to over 2000 yards, depending on the core and on the combined effects of sensor resolution and lens size.
Pixel pitch is the center-to-center distance between adjacent pixels; common options are 12 µm and 17 µm. A smaller pixel pitch of 12 µm packs more pixels into the same optical footprint and provides sharper images than 17µm when paired with matched optics. However, each 12 µm pixel absorbs less IR than a 17 µm pixel, so the lens and NETD must compensate. The trade-off: 12 µm excels at detecting small, distant hot targets with the same lens size, while 17 µm, with low NETD, can be more forgiving for all-around use across different scenarios.
NETD (Noise Equivalent Temperature Difference) represents the smallest temperature difference the sensor can reliably distinguish from the infrared light emitted by objects, rather than by directly detecting heat from the animal or surroundings. A lower NETD value indicates higher thermal sensitivity. Thermal sensitivity is measured in milliKelvins (mK). Values below 40 mK are good; below 30 mK is very good; NETD values below 25 mK indicate high thermal sensitivity at the elite level. On a warm August night when the ground holds heat energy and everything looks "washed out," low NETD is the spec that keeps your image usable.
Here's the critical point most articles miss: a well-matched 384×288 VOx sensor at 12 µm with NETD below 30 mK can outperform a poorly implemented 640×512 core with a 17 µm pitch and a 50 mK NETD, especially in low-heat-contrast conditions. The trio works as a system.
If you've ever been confused by two scopes with matching headline specs delivering completely different images, you're not crazy - and you're not alone. Resolution is the starting point, not the finish line. For a complete high-level understanding of all components, see our ultimate guide to thermal optics.
Objective lens quality changes everything downstream. Germanium lenses need anti-reflection coatings optimized for the 8–14 µm band, and transmission above 80–90% is a benchmark for high-quality thermal scope glass. A larger objective lens (50 mm vs 35 mm) gathers more IR, improving both detection range and image clarity. The f-number matters too: an f/1.0 lens delivers significantly more infrared energy to the sensor than an f/1.4, which directly improves the system's effective thermal sensitivity. Lens size is one of the most overlooked factors in real-world performance. The lens is the starting point of every good thermal optic. Even the best sensor is only as effective as the glass that gathers and delivers infrared light to it. For a complete, in‑depth look at how lens size, materials, and design impact image quality, see our guide to thermal scope lenses.
Image processing is where manufacturers apply their secret sauce - denoising, sharpening, and algorithms to enhance contrast. Aggressive processing can clean up grain but may blur fine detail or, worse, introduce lag. Some scopes with heavy image enhancement pipelines create up to 0.6 seconds of delay between what's happening and what you see. For a fast-moving coyote at 75 yards, that's not a software quirk - that's a miss.
Display technology also shapes what you perceive. Most thermal scopes use OLED or AMOLED display screen panels in the eyepiece. The display resolution must match or exceed the sensor resolution to avoid image bottlenecks. A 50–60 Hz refresh rate delivers smoother motion than 30 Hz, reducing eye strain and improving shot placement on moving targets. Night vision provides natural-looking images, while thermal imaging shows heat patterns and heat signatures rendered through color palettes such as white-hot or black-hot.
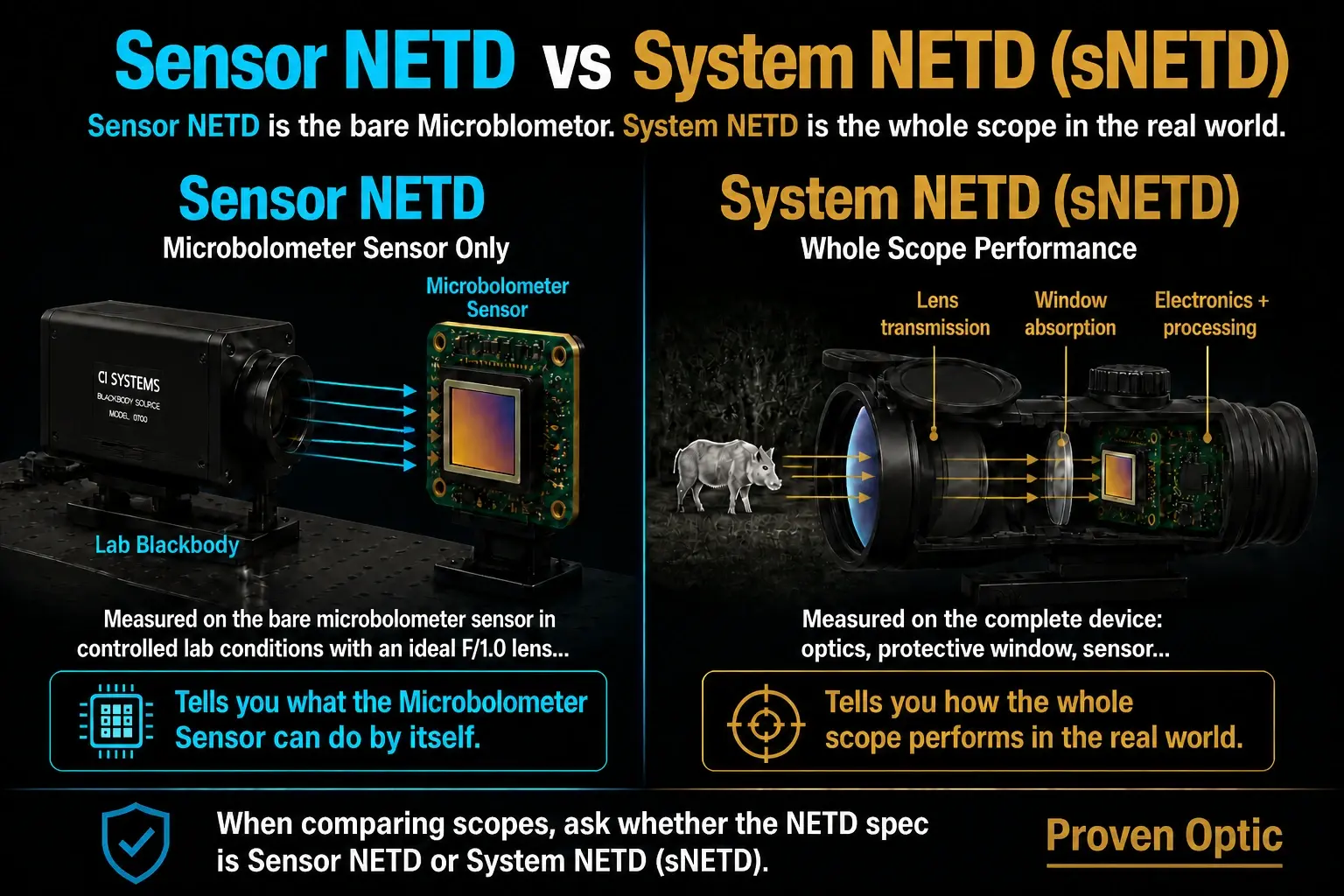
System NETD (sNETD) is a concept most buyers never encounter. Sensor NETD measures the bare chip in lab isolation. System NETD reflects how the whole package performs - including optics transmission losses, housing window absorption, and processing overhead. A great sensor behind poor glass with a lossy front window won't score as well as its raw sensor data spec suggests. When comparing scopes, ask which NETD is being quoted.
Non-Uniformity Correction (NUC) is the periodic shutter-click calibration that corrects pixel drift and prevents ghosting. VOx cores may go hours between NUCs; a-Si often needs correction more frequently. Each NUC briefly blanks your image - an interruption that matters when you're watching a coyote work a call.
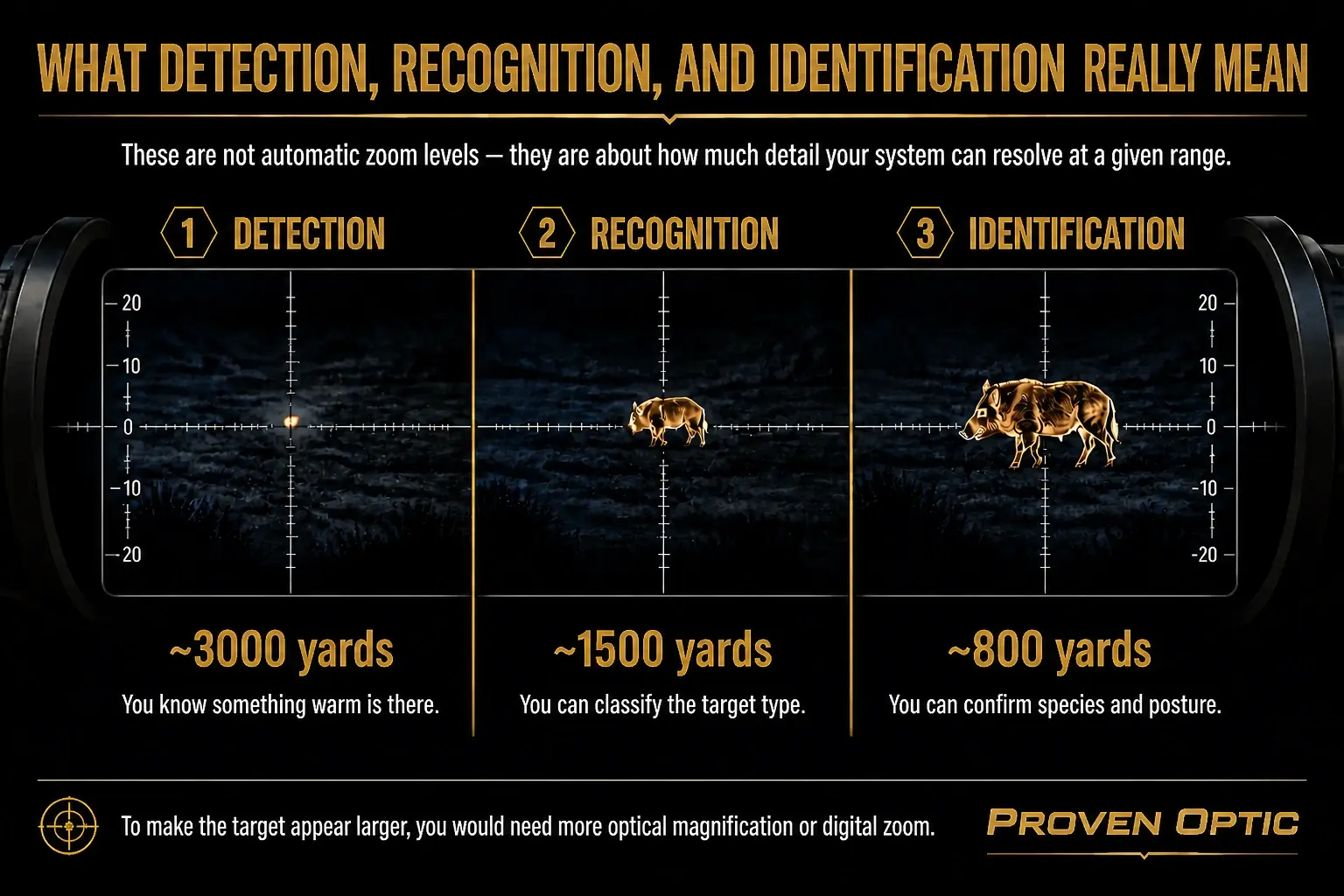
Detection range tells you how far away you can spot that "something warm is there." But detection alone doesn't put ethical shots on target. The DRI framework breaks thermal performance into three tiers that matter.
Detection means you notice a thermal signature - a warm blob against a cooler background.
Recognition means you can categorize it as a human, hog, coyote, or vehicle.
Identification means you can confirm species, posture, and whether it's a legal target before pulling the trigger. For ethical hunting, the identification range is the number that matters - not the headline detection figure.
High-end thermal scopes can detect thermal signatures at ranges over 2,800 meters (3,062 yards). But real-world identification happens at a fraction of that distance. Detection range is typically 3000 yards for thermal imaging scopes at the high end. Recognition range is usually 1500 yards. Identification range is generally 800 yards. These numbers assume good thermal contrast and a cooperative atmosphere.
Thermal contrast - the temperature difference between your target and its background - is the silent variable. On a cold December night, a warm-bodied coyote against frozen ground practically glows. On a humid August evening, when the ground retains heat energy and radiates IR light strongly, even a premium core struggles to separate body heat from background. Summer heat compresses the identification range far more than the detection range, which is why low NETD matters most when the heat difference between the target and the terrain shrinks.
Thermal scopes can see through fog and smoke where night vision cannot, but remember that humidity and atmospheric moisture still reduce thermal contrast and compress these ranges. Thermal optics are used for wildlife management and population control in part because they allow managers to detect variations and count animals across wide areas in complete darkness.
Higher-resolution cores and faster refresh rates demand more power. A 640×512 sensor running at 50 Hz with active image processing, video recording capabilities, and Wi-Fi streaming will drain batteries faster than a 384×288 at 30 Hz. Typical battery life for a full night of active use runs 4–6 hours for mid-to-premium thermal rifle scopes, though swappable packs and external USB-C power banks can extend that.
Refresh rate directly affects how natural the image feels when you're panning or tracking. At 30 Hz, motion looks choppy - fine for stationary scanning, but problematic when swinging on a running hog. Most thermal scopes in the premium category now ship at 50 Hz, and many push 60 Hz, delivering smoother thermal vision for dynamic field use. Anything below 30 Hz feels laggy enough to affect shot timing.
Thermal cores generate their own heat during operation. Without proper housing design and firmware-based temperature compensation, the sensor's effective NETD degrades over the course of a long night as internal temperatures rise. Quality scopes use heat sinking, thermal pads, and active firmware monitoring to maintain optimal performance from the first scan at dusk through the last hour before dawn. This is one of those invisible engineering decisions that separates scopes you can trust from those that fade when you need them most.
The goal is simple: turn the technical core specs above into a clear decision that matches your terrain, targets, and shooting distances. Traditional scopes rely on low optical dispersion and light transmission. Modern thermal scopes rely on sensor architecture and IR optics. Here's how to match them.
|
Your use case |
What to prioritize |
What you can flex on |
|---|---|---|
|
Hogs/coyotes at feeders, under 150 yd |
VOx, 320–384 resolution, NETD ≤40 mK, good processing |
Pixel pitch is less critical at close range |
|
Mixed terrain, 150–300 yd |
384–640, VOx, ≤35 mK NETD, 12–17 µm, 35–50 mm objective lens |
Video recording and Wi-Fi are secondary |
|
Open country, 300+ yd |
640×512, 12 µm, VOx, ≤25 mK, high quality 50–60 mm germanium lens, ≥50 Hz |
Digital zoom matters less when the sensor is right |
If you remember nothing else:
VOx generally outperforms a-Si in real-world image clarity, especially under marginal thermal contrast conditions.
Low NETD matters most in warm, humid, or foggy environments - exactly when you need your scope most.
Resolution, pixel pitch, and NETD together beat any single spec alone. Pair them with quality glass, or the numbers on the box mean nothing.
Proven Optic staff can help you interpret confusing core specs from different manufacturers and match them to your exact shooting environment, state regulations, and target species. That's what a specialist retailer focused solely on optics is for.
These are real questions Proven Optic hears from hunters and tactical professionals shopping for their first or next thermal scope.
What is a microbolometer in a thermal scope? A microbolometer is the uncooled thermal imaging sensor inside the scope - a grid of microscopic pixels that each change electrical resistance when infrared radiation strikes them. It's the thermal camera core that sits behind the germanium lens and produces the raw signal the scope turns into an image. A thermal camera includes the full package: lens, core, processor, and display.
Does higher sensor resolution always mean better image quality? Not always. Higher thermal sensor resolution improves detail and extends identification range, but only if NETD, optics, and processing support it. A 640×512 core with high NETD and a poor lens can look worse than a well-built 384×288 with strong thermal sensitivity and quality glass.
What does NETD mean and why does it matter? NETD stands for noise equivalent temperature difference. It measures the smallest temperature difference the sensor can reliably detect. Lower values mean the scope can detect heat in low-contrast conditions - warm summer nights, fog, humidity - where heat variations between target and background are minimal.
What is the difference between VOx and a-Si sensors? VOx (vanadium oxide) typically delivers lower noise, better low-contrast performance, and more stable images over time. a-Si (amorphous silicon) can be more affordable but tends to produce grainier images, especially in warm or humid conditions. For hunting thermal optics, VOx is generally the stronger choice.
Is 12 µm or 17 µm pixel pitch better for hunting? It depends on distance and lens. A 12 µm pitch packs more pixels per field of view and gives sharper detail on distant targets. A 17 µm pitch captures more IR per pixel, which can improve thermal sensitivity when paired with proper optics. For mixed-distance hunting, 12 µm with matched glass is the current standard.
Why does my thermal scope look worse in summer than winter? Because thermal contrast drops. In summer, the ground and foliage retain and radiate heat, narrowing the temperature difference between your target and its background. The sensor's NETD gets taxed harder. Low NETD and VOx material help, but summer will always be harder for any thermal device.
What is the difference between sensor NETD and system NETD (sNETD)? Sensor NETD is measured on the bare chip under lab conditions. System NETD accounts for everything: lens transmission losses, front window absorption, housing effects, and processing overhead. System NETD is always a higher (worse) number. When comparing scopes, ask which one the manufacturer is quoting.
Why does image processing lag matter on a rifle scope? Lag from heavy denoising or low refresh rate delays what you see relative to what's happening. On a running hog at 75 yards or a coyote cutting across your field of view, even a few tenths of a second of lag means your reticle is behind the target. For rifle-mounted use, low-latency processing and 50+ Hz refresh rate are worth prioritizing.
Can thermal scopes see through walls or heavy cover? No. Thermal imaging scopes detect IR radiation from surfaces that have a direct line of sight to the sensor. Solid walls, thick brush, and heavy cover block infrared light completely. You may detect heat signatures through thin gaps in vegetation, but a thermal scope cannot see through opaque barriers.
The microbolometer sensor - its material, resolution, pixel pitch, and NETD - collectively dictates your real-world detection range, thermal contrast, and identification range. These aren't just spec sheet numbers. They're the difference between confidently identifying a coyote at 400 yards and hesitating over a gray shape you can't confirm. Traditional scopes live and die by glass quality. Thermal scopes live and die by what's inside the core.
Thermal scopes see infrared light emitted because of heat, and the core converts that radiation into the image you see in the eyepiece. Understanding that chain - from emitted infrared light to absorber layer to ROIC to processed display image - puts you ahead of buyers who stop at "640×512" and call it done. Look deeper. Evaluate sensor specs, thermal sensitivity, refresh rate, and lens quality together.
Proven Optic focuses exclusively on optics and can walk you through sensor-level trade-offs for your specific terrain, target species, and shooting conditions. As thermal core resolution and NETD continue to improve beyond 2026, the fundamentals covered here will keep you ahead of the curve and help you invest once - in the right scope - instead of twice. For more on selecting the right thermal optics, see our complete thermal scopes guide.